Hi, my name is Cubastic and today I will teach you how to solve a 3x3 Rubik’s cube. The technique I’m about to show you is really easy and absolutely everyone can learn it. I can guarantee that after watching all 4parts of this tutorial you will easily solve a Rubik’s cube no matter how scrambled itis. And if you already know how to solve a Rubik’s cube this method still will be really useful because with it you’ll be able to teach your friends, your parents, your siblings or classmates. Let’s go. First, let’s learn what the Rubik’s cube consists of. It has 6 faces and therefore 6 colours. White, yellow, green, blue, red and orange. It’s really important to remember that white will always be opposite yellow, blue opposite green and red opposite orange. That is due to the Rubik’s cube structure. And no matter how you turn or scramble it- white center piece will always be opposite yellow, blue opposite green and red opposite orange. It’s also really important to know that a Ru...
Hi evrybody, i am cubastic.
here is our rubik's cube solving robot.
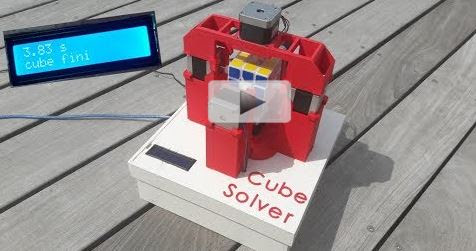
This is my friend school project. To rotate the face of the cube, we are using six stepper motor. We modelized and 3D printed modifed center caps to connect motor's axis to the cube. The outside of the robot was also 3D printed, there is two part : the upper part with the upper motor on it and the base with the 5 others motors on it. There is an LCD screen so we can show the timer for the solve. The robot is placed on a box with all the electronic stuff in it. Here is the interior of the box. We can see an Arduino MEGA wich receive data from PC to control the 6 steppers motors using L293D.
There is also the LCD screen controled by the Arduino MEGA. In the program there is a representation of the Rubik's Cube that allow it to know how the cube is scrambled.
We can generate a scramble and send it to the robot. The robot will execute the scramble and look like the representation. Or we can already have a scrambled cube and reproduce the scramble on the representation.
We didn't integrate color recognition with cameras because we did'nt have the knowledges for this. Once the program have the representation, we can click on the solve button. First the program will solve the corners like a 2x2 cube with Ortega's method then, we solve the edges with the Beyer-Hardwick's method. In average it will generate a solution between 60 and 70 moves.
Now, we are showing you a solve example when the program generate a scramble himself. We generate a scramble. Now we send it to the robot. The scramble on the cube is the same that the one on the represenation.
The LCD screen shows the time of the scramble : 2.03s. Now the solve. The cube is solved, and the LCD screen show the time : 5.79s.
That's all for this example. We are going to scramble the cube manually and then, we will enter the colour in the program to do a manually scrambled resolution. Let's go ! We reproduced the colour on the program. We removed the center caps to put it in the robot. We put the upper motor.
Everything is placed correctly, we are ready for the solve. The cube is solved, LCD screen shows the time : 5.18s. That's it for this example.
Finally, we are going to show you the record we established with this robot wich is 3.83s! Here is the scramble. We send the scramble to the robot.
The cube is correctly scrambled, following the representation in the program. And now the solve.
Video
The cube is solved, LCD screen show our record : 3.83s! Thank for watching!
Comments
Post a Comment